![]()
وحيد نقشينه
آیندهنگری
رؤياى طراحان اوليه رايانه از بابيج تا تورينگ، ساخت ماشينى بود كه توانايى حل همه مسائل را داشته باشد. ماشينى كه در نهايت ساخته شد و به نام رايانه در دسترس همگان قرار گرفت تنها توانايى حل دسته اى از مسائل خاص و محدود را داشت، اما نكته اينجاست كه همه مسائل از نظر طراحان اوليه رايانه چه مى توانست باشد؟
به طبع چون طراحان اوليه رايانه همگى منطق دان و رياضيدان بودند، منظورشان همه مسائل منطقى و محاسباتى بود از اين رو عجيب به نظر نمى رسد كه فون نيومان سازنده نخستين رايانه، در حال ساخت اين ماشين اعتقاد داشت كه براى داشتن ماشينى هوشمند شبيه به انسان راه حل نهايى استفاده از منطق نيست بلكه كليد نهايى حل اين مشكل رازى نهفته در دانش ترموديناميك است.
* تاريخ هوش مصنوعى
هوش مصنوعى علمى است بسيار جوان و روبه رشد. شروع هوش مصنوعى به سال
۱۹۵۰
بازمى گردد يعنى زمانى كه آلن تورينگ مقاله خود را درباره ساخت ماشين
هوشمند به رشته تحرير درآورد. در اين مقاله تورينگ روشى را براى تشخيص
هوشمندى ماشين ها پيشنهاد داد.
روش پيشنهادى تورينگ بيشتر شبيه به يك بازى بود بدين نحو كه يك انسان و يك
ماشين روبروى هم و پشت پرده اى قرار مى گرفتند. ماشين بايد با طرح سؤالاتى
از انسان او را وادار به پذيرش هوشمند بودن خود مى كرد. روش پيشنهادى
تورينگ به شرح زير است: فرض كنيد كه انسانى در يك سمت ديوارى قرار دارد و
توانايى برقرار كردن ارتباط به صورت تله تايپ با آن سوى ديگر ديوار را دارا
باشد. مكالمه اى ميان دو نفر انجام مى شود اگر پس از پايان مكالمه به آن
شخص گفته شود كه در طرف مقابلش نه يك انسان بلكه يك ماشين قرار داشته كه
پاسخ او را مى داده است و اين امر بدون پى بردن شخص نسبت به هويت واقعى طرف
مقابل انجام شود مى توان آن ماشين را ماشينى هوشمند قلمداد كرد.
نقطه آغاز علم هوش مصنوعى را مى توان به بعد از جنگ جهانى دوم نسبت داد، در
آن زمان واينر با توجه به مسائل سايبرنتيك زمينه را براى پيشرفت هوش مصنوعى
به وجود آورد و سپس در سال
۱۹۵۰
تورينگ آزمايش بالا را براى اثبات هوشمند بودن يك ماشين پيشنهاد داد و سپس
در سال
۱۹۵۶
گروهى از علاقه مندان به هوش مصنوعى در كالج دارتموت گرد هم آمدند و
تحقيقات وسيعى را براى هوش مصنوعى آغاز كردند.
دهه
۱۹۶۰
را مى توان دهه توسعه و پيشرفت تحقيقات در زمينه هوش مصنوعى ناميد. در اين
سال ها بود كه با تلاش هاى دانشمندان هوش مصنوعى، برنامه هاى بازى شطرنج و
ربات هاى هوشمند پا به عرصه گذاشتند و پس از آن هر سال پله هاى پيشرفت و
ترقى خود را پيمودند.
*
جان مك كارتى
پروفسور جان مك كارتى در سال
۱۹۲۷
در شهر بوستون متولد شد. وى درجه كارشناسى ارشد خود را در رشته رياضى در
سال
۱۹۴۸
از انستيتو كاليفرنيا و مدرك دكتراى خود را از دانشگاه پرينستون در سال
۱۹۵۱
دريافت كرد. او با ادامه تحصيل در رشته علوم كامپيوتر موفق به دريافت درجه
استادى در اين رشته، از دانشگاه استنفورد شد و از سال
۱۹۶۵
تا
۱۹۸۰
سرپرستى آزمايشگاه هوش مصنوعى دانشگاه استنفورد را برعهده داشت.
مك كارتى كه از جمله بنيان گذاران هوش مصنوعى به حساب مى آيد، در زمان
مطالعات خود درباره اين علم زبانى را براى توصيف و توسعه هوش مصنوعى با
عنوان
list processing
يا همان
LISP
ابداع نمود. اين زبان تا سال
۱۹۵۸
از سوى همكاران كارتى در دانشگاه
MIT
توسعه داده شده و در اين سال به عنوان يك زبان كامل وارد دنياى
برنامه نويسان شد.
مك كارتى و همكارانش معتقد بودند كه مى توان كارى كرد كه ماشين نيز داراى
هوش باشد و اين هوش همانند هوش انسانى باشد و
LISP
زبانى است كه مى تواند اين هوش را به وجود بياورد.
*
LISP
زبان هاى
lisp
و
prolog
زبان هايى هستند كه براى طراحى و برنامه نويسى هوش مصنوعى بر روى ماشين ها،
بيش از ديگر زبان ها كاربرد دارند.
Lisp
زبانى است كه بيش از ديگر زبان ها در آمريكا رواج دارد و
prolog
بيش تر به وسيله اروپايى ها و ژاپنى ها مورد استفاده قرار مى گيرد.
Lisp
داراى انعطاف بيشترى نسبت به زبان
prolog
است و در مقابل طراحى
prolog
سطحى بالاتر نسبت به
Lisp
دارد.
* هدف هوش مصنوعى
همه افرادى كه نخستين گام ها را در راه معرفى و شناخت هوش مصنوعى برداشتند
به دنبال يك هدف بودند و آن نيز رساندن سطح هوش مصنوعى به سطح هوش انسانى
بود. اما امروزه مى دانيم كه مطالعه و بررسى در زمينه هوش و درك مكانيزم آن
بسيار پيچيده است، هم اكنون مى توان موضوع هوش را از دو ديدگاه متفاوت مورد
بررسى قرار داد:
۱-
آگاهى از جهان اطراف چگونه حاصل مى شود و چه طور مى توان از حقايق و كشفيات
نتيجه گيرى هوشمندانه اى به عمل آورد؟
۲-
كشف و شهود آگاهانه به اين معنا كه براى رسيدن به هدفى مشخص هزاران راه و
بيراهه وجود دارد كه با استفاده از هوش مصنوعى مى توان راه را از بيراهه
تشخيص داد.
* هوش مصنوعى و هوش انسانى
در شبكه ارتباطى مغز انسان سيگنال هاى ارتباطى به صورت پالس هاى الكتريكى
وجود دارد. جزء اصلى مغز نرون است كه از ساختمانى سلولى و مجموعه اى از
شيارها و خطوط به وجود مى آيد كه اين شيارها محل ورود اطلاعات به نرون هاست
و خطوط نيز محل خروج اطلاعات از نرون است.
محل اتصال نرون ها به يكديگر را سيناپس مى گويند كه مانند دروازه اى براى
ورود و خروج اطلاعات (Data)
عمل مى كند، اگر واكنش هاى نرون ها به پالس هاى متفاوت هماهنگى كامل داشته
باشند اتفاق هاى مهمى در مغز انسان رخ داده است.
گروهى از دانشمندان هوش مصنوعى كه رويكرد مدل مغزى را دنبال مى كنند، شكلى
از مدارهاى الكترونيكى را طراحى كرده اند كه تاحدودى شبيه شبكه مغز انسان
است ، در اين ساختار هر گروه به تنهايى خود يك پردازنده (CPU)
است ولى رايانه هاى معمولى تنها توانايى داشتن بيش از چند
CPU
را به صورت هم زمان ندارند. هدف از راه اندازى اين شبكه عصبى رايانه اى
طراحى مكانيسمى است كه مانند مغز انسان توانايى يادگيرى داشته باشد. سامانه
شبكه عصبى اين كار را از راه ارزش گذارى كمى براى ارتباطات سيگنال ها بين
نرون ها انجام مى دهد كه اين مكانيسم ارزش گذارى به وسيله مقاومت ها با
تقويت يا تضعيف پالس ها انجام مى شود.
باتوجه به تعداد زياد نرون ها در شبكه عصبى خرابى تعدادى از آنها تأثير
چندانى بر عملكرد سامانه ندارد تاكنون چند سيستم آزمايشى با استفاده از اين
اصول طراحى و ساخته شده اند.
* ويژگى هاى هوش مصنوعى
ماشين هايى كه به عنوان ماشين هاى هوشمند شناخته مى شوند توانايى فكر كردن
بدون نياز به انسان را دارد و اين به دليل وجودخصلت هوش مصنوعى
Artificial Intelligence
دراين گونه ازماشين هاست. ماشين ها تنها در صورتى يك ماشين باهوش شناخته
مى شوند كه داراى قابليت هاى خاصى باشد كه يكى از اين ويژگى ها شناخت از
وجود خود است كه تاكنون ماشينى كه اين توانايى را به طور كامل داشته باشد
به وجود نيامده است، ويژگى بعدى ماشين هاى هوشمند توانايى شناخت محيط
پيرامون خود است كه اين امكان در برخى از ماشين هاى هوشمند امروزى كه با
نام «ربات هاى امدادگر» شناخته مى شوند وجود دارد، ويژگى بعدى در
ماشين هايى كه داراى هوش مصنوعى هستند توانايى نشان دادن عكس العمل در
مقابل كنش هاى حاصل از محيط است كه اين امكان نيز در ربات هاى هوشمند
امروزى و در دسته خاصى از آن ها باعنوان «ربات هاى كاوشگر» فراهم آمده است.
* كاربردهاى هوش مصنوعى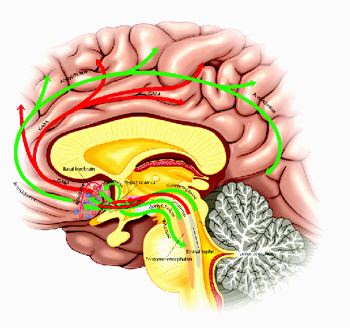
از كاربردهاى هوش مصنوعى مى توان به موارد زير اشاره كرد:
۱ـ
طراحى نرم افزارهاى هوشمند: اين گروه از نرم افزارها براى انجام كارهاى
تخصصى طراحى شده اند و داراى توانمندى هاى بالايى نيز هستند، پشتوانه اين
گونه از برنامه ها وجود يك بانك اطلاعاتى (Data
Base)
قوى براى پاسخگويى به پرسش هاى مختلف كاربران است. نمونه هايى از اين گونه
از نرم افزارها نيز، نرم افزارهايى است كه در آزمون هاى استخدامى و
دانشگاهى مورد استفاده قرار مى گيرد.
۲ـ
طراحى بازى هاى هوشمند: زمانى كه شما در حال انجام يك بازى رايانه اى
هستيد، دشمنان شما از هوش كافى برخوردارند. اگر شما به آن ها شليك كنيد
آن ها اقدام به فرار كرده و يا با مقابله به سوى شما شليك خواهند كرد. اين
فرآيند نيز به دليل وجود هوش مصنوعى در دشمنان شماست كه آن ها را به واكنش
نسبت به شما برمى انگيزاند.
۳ـ
طراحى ربات هاى هوشمند: كاربرد عمده ديگر هوش مصنوعى در طراحى ماشين ها به
نسبت هوشمند است. ماشين هايى مانند ربات هاى كاوشگر و ربات هاى امدادگر.
در ربات هاى امدادگر، ربات بايد در محدوده مورد نظر به دنبال مصدومان حادثه
بگردد و پس از يافتن آن ها كمك هاى مورد نياز را در اختيار آن ها قرار دهد
كه اين خود نياز به داشتن شناخت از محيط دارد. دسته ديگر ربات ها يعنى
ربات هاى كاوش گر بايد به دنبال قطعه مورد نظر در مكانى خاص باشند و يا
مسيرى را كه از پيش تعريف شده است دنبال كنند كه اين نيز نيازمند داشتن هوش
مصنوعى در اين دسته از ربات ها است.
* نتيجه
هوش مصنوعى هنوز راه درازى در پيش دارد، شبكه سازى عصبى كه در سال هاى
گذشته شاهد تغييرات عمده اى نيز بوده است هر روز به دوران رشد و بلوغ خود
نزديك تر مى شود.
به عنوان مثال پژوهشگران پيش بينى مى كنند كه به كمك فناوى نرم افزارى جديد
شبكه هاى عصبى بتوان پيش بينى هاى بسيار دقيقى از بازار سهام به عمل آورد و
پيش بينى هاى دقيق ترى مانند مكان فيزيكى سياره ها درسال هاى آتى و اوضاع
كره زمين از نظر شرايط زيست محيطى و غيره نيز ميسر خواهد شد.
امروزه نگرش تاز ه اى نسبت به هوش مصنوعى به وجود آمده است كه در بسيارى از
آزمايشگاه ها در حال بررسى است. پژوهشگران سعى مى كنند دريابند آيا
مجموعه اى از ربات هاى نيمه هوشمند مى توانند يك هوش جمعى ايجاد كنند به
نحوى كه هوش جمعى حاصل از هوش اعضاى تشكيل دهنده اين مجموعه بيشتر باشد؟